
Los servos son motores que nos permiten controlar modelos RC telematicamente. Estos motores se conectan al receptor desde el cual reciven alimentación eléctrica y el control mediante pulsos.
Los servos son dispositivos
pequeños,
compactos y económicos. Constan de un motor, la carcasa, mecanismo
para posicion de retorno y electrónica de control. El motor servo
pude ser controlado para mover cualquier posición usando un simple
control por pulsos.
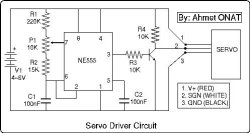
Los servos se conectan
mediante tres
cables, el de masa, el positivo y el de control:
Cable Negro: Masa
Cable Blanco: Pin de
control por
pulsos.
Cable Rojo: +4,8V
El control de los motores
servo se hace
a través del receptor el cual emite pulsos de un duracion desde 1ms
a 2ms repartidos en 50-60 veces por segundo.
Enviando un pulso de 1 ms fijas el servo en una de las
posiciones
finales y enviando pulsos de 2ms en la otra posición final. Enviando
pulsos de 1,5ms posicionamos el servo en la posición central.
El esquema de control es muy sencillo de implementar con algo
de
electrónica. Tú puedes construir facilmente un timer usando el chip
555 timer para la generación de pulsos.
Supongamos que quiero mover
el servo 30
grados:
Sabemos que con un pulso de
1ms
posicionamos el servo en la posición inicial, con 1.5 en la central
y que con 2 ms el la pisición final. Sabemos también que la
relación es lineal. Por lo tanto bastará con hacer una simple regla
de tres para calcular los ms del pulso que deseamos.
Supongamos que 0 grados es
un pulso de
1ms y que 120 grados los hacemos con 2ms, según lo explicado, parea
posicionar el servo en 30 grados necesitamos un pulso de 1,16ms.